

软件大小:2.34G
软件语言:简体中文
软件授权:免费软件
软件类别:编程开发
软件等级:
更新时间:2023-12-22
官方网站:
应用平台:Win2003,WinXP,Vista,Win7,Win8
- 软件介绍
- 软件截图
- 合集推荐
- 其他版本
- 相关阅读
- 下载地址
RobotStudio 是一款专业优秀的计算机仿真软件,您可以使用它在办公室轻易地模拟现场生产过程,无需花巨资于昂贵的设备,就可以模拟生产过程的情况,它让您在实际构建机器人系统之前先进行设计和试运行,帮助用户进行离线编程,可以让您在不干扰生产的情况下执行培训、编程和优化等任务,从而降低购买与实施机器人的总成本。

【功能特点】
1、CAD导入:RobotStudio可方便地导入各种主流CAD格式的数据,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。
2、AutoPath:RobotStudio中最能节省时间的功能之一。该功能通过使用待加工零件的CAD模型,仅在数分钟之内便可自动生成跟踪加工曲线所需要的机器人位置(路径),而这项任务以往通常需要数小时甚至数天。
3、程序编辑器:程序编辑器(ProgramMaker)可生成机器人程序,使用户能够在Windows环境中离线开发或维护机器人程序,可显著缩短编程时间、改进程序结构。
4、路径优化:如果程序包含接近奇异点的机器人动作,RobotStudio可自动检测出来并发出报警,从而防止机器人在实际运行中发生这种现象。仿真监视器是一种用于 机器人运动优化的可视工具,红色线条显示可改进之处,以使机器人按照最有效方式运行。可以对TCP速度、加速度、奇异点或轴线等进行优化,缩短周期时间。
5、Autoreach:Autoreach可自动进行可到达性分析,使用十分方便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。

6、虚拟示教台:是实际示教台的图形显示,其核心技术是VirtualRobot。从本质上讲,所有可以在实际示教台上进行的工作都可以在虚拟示教台(QuickTeach™)上完成,因而是一种非常出色的教学和培训工具。
7、事件表:一种用于验证程序的结构与逻辑的理想工具。程序执行期间,可通过该工具直接观察工作单元的I/O状态。可将I/O连接到仿真事件,实现工位内机器人及所有设备的仿真。该功能是一种十分理想的调试工具。
8、碰撞检测:碰撞检测功能可避免设备碰撞造成的严重损失。选定检测对象后,RobotStudio可自动监测并显示程序执行时这些对象是否会发生碰撞。
9、Visual Basic for Applications:可采用VBA改进和扩充RobotStudio功能,根据用户具体需要开发功能强大的外接插件、宏,或定制用户界面。
10、PowerPac's:ABB协同合作伙伴采用VBA进行了一系列基于RobotStudio的应用开发,使RobotStudio能够更好地适用于弧焊、弯板机管理、点焊、CalibWare(绝对精度)、叶片研磨以及BendWizard(弯板机管理)等应用。
11、直接上传和下载:整个机器人程序无需任何转换便可直接下载到实际机器人系统,该功能得益于ABB独有的VirtualRobot技术。
【怎么设置控制器】
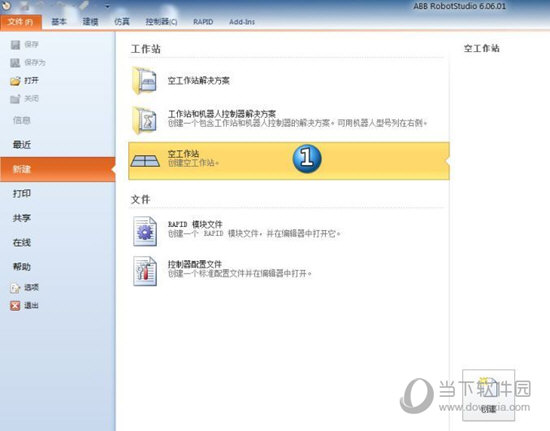
1、首先打开 RobotStudio 并创建新的空工作站。
2、导入一台机器人
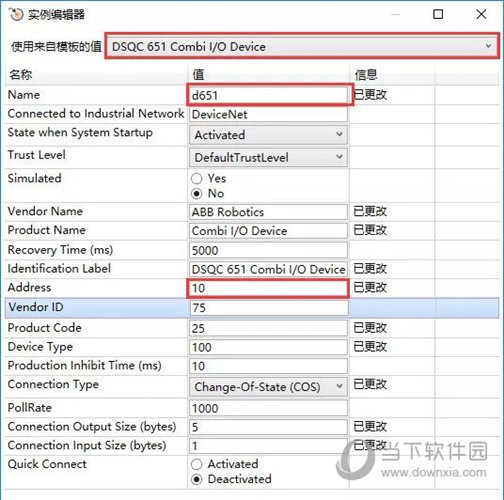
3、配置抓手控制信号
点击“控制器”菜单下的“配置编辑器”下的小三角,弹出的下拉菜单中选择,在弹出的对话框中,左侧右击“DeviceNet Device”,选择”新建DeviceNet Device“,在弹出的对话框中做如下配置,点击确定按钮。
右击“Signal“选择”新建Signal“,在弹出的对话框中做如下配置,点击确定按钮。 配置完成后,点击“重启“ 按钮,重启机器人系统。
4、抓手控制信号连接
在“仿真“菜单下,点击”配置“旁边的小箭头,在弹出的事件管理器对话框中,点击”添加“按钮,弹出创建新事件-选择触发类型和启动对话框中保持默认,点击”下一个“。
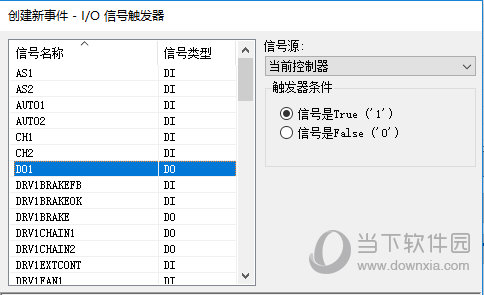
创建新事件-I/O信号触发器中选择“DO1”,点击“下一个”按钮。
创建新事件-选择操作类型的设定动作类型下选择“将机械装置移至姿态”,点击“下一个“按钮。
将机械装置移至姿态中,机械装置下选择创建的工具,姿态选择“CLOSE”,点击“完成”按钮。
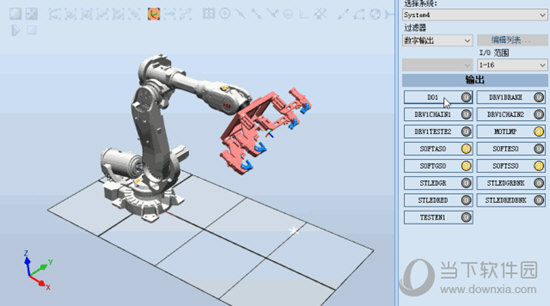
5、抓手运动仿真
在“控制器”菜单下,点击“控制面板”按钮,将机器人控制器切换为手动运行状态。
切换回“仿真”菜单,点击“I/O仿真器”,在弹出的I/O仿真器面板中点击DO1,查看抓手开合状态。
【怎么改时间】
1、我们首先查看软件试用到期日期,打开RobotStudio后,点击"帮助"红色圈中,软件会显示到期日期,下面我们可以来修改到期日期

2、打开运行框,直接按"Win键"+"R键",在弹出的对话框中,输入"regedit"(Win键就是你键盘上那个微软LOGO的按键)。
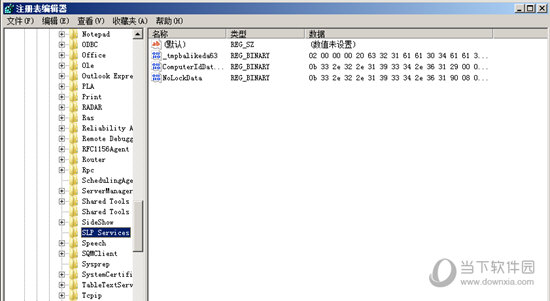
3、如果你的打开出错请检查下是否输入有误,我们打开注册表的路径为“HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services“64位的为”HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services“
4、点击“HEKY_LOCAL_MACHINE”选项中的“SOFTWARE”下的Microsoft”找到“SLP Services”项,左键点击之后,我们可以在”NoLockData“上右键,点击”修改“
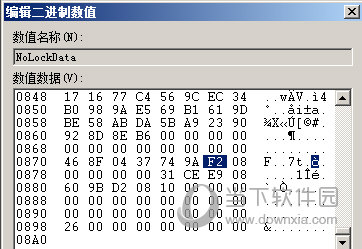
5、弹出一个数据编辑框,我们拖动滑条到最后
6、拖到最后如下,我们找到红色圈中的”0807“那一行,选中D2那一项,按键盘F键再按数字2,就修改好了。(15年是D2,16年就是D3,依次类推,一定先选中!不然修改不了!!!)
7、把D2修改成F2就可以了,点击”确定“,不点击修改不生效,如果你的修改不成功请仔细检查下与下图是否一样
8、再次打开,点击”帮助“日期就变成2044年了,应该够用。
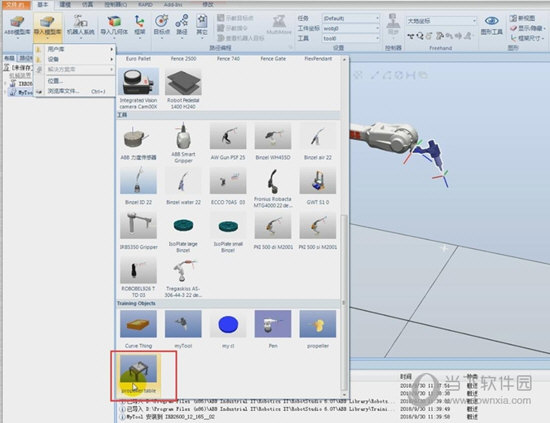
【如何导入模型】
1、在“基本”功能选项卡中,在“导入模型库”下拉“设备”列表中选择“propeller table”模型进行导入。
2、在“布局”中,选中机器人本体,单击右键,选择“显示机器人工作区域”。白色区域为机器人可到达范围。
3、工作对象应调整到机器人的最佳工作范围,这样才可以提高节拍和方便轨迹规划。下面将小桌子移到机器人的工作区域。
要移动对象,则要用到Freehand工具栏功能。在Freehand工具栏中,选定“大地坐标”和单击“移动”按钮。拖动箭头到达合适位置。
4、在“基本”功能选项卡中,选择“导入模型库”,在下拉“设备”列表中选择“Curve Thing”,进行模型导入。
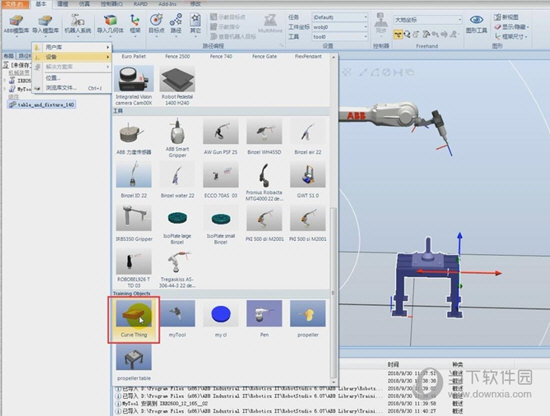
5、将“Curve Thing”放置到小桌子上去。在对象上单击右键,选择“位置”单击“放置”中的“两点”。
为了能够准确捕捉对象特征,需要正确地选择捕捉工具。将鼠标移动到对应的捕捉工具,则会显示详细的说明。
6、选中捕捉工具的“选择部件”和“捕捉末端”。
7、单击“主点-从”的第一个坐标框。
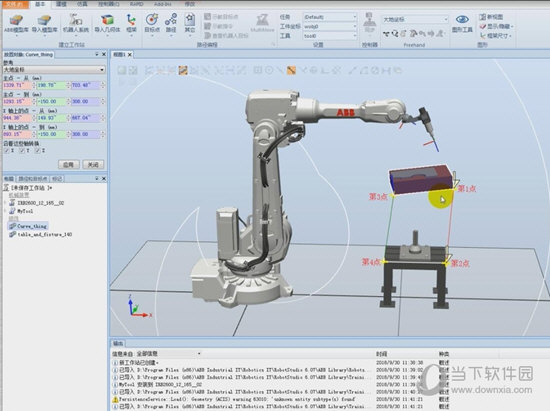
8、按照顺序单击两个物体对齐的基准线:
第1点与第2点对齐;
第3点与第4点对齐。
9、对象点位的坐标值已自动显示在框中,然后单击“应用”。
10、对象已准确对齐放置到小桌子上。
- 机器人编程软件

-
 115.88M 简体中文
115.88M 简体中文 -
 83.22M 简体中文
83.22M 简体中文 -
 3.97M 简体中文
3.97M 简体中文
 盒伙人 V2.5.0 苹果版
盒伙人 V2.5.0 苹果版 深圳地铁通 V12.3.1 苹果版
深圳地铁通 V12.3.1 苹果版 护理易企业端 V1.79 iPhone版
护理易企业端 V1.79 iPhone版 小电卫士 V3.2.0 苹果版
小电卫士 V3.2.0 苹果版 得居 V1.3.0 苹果版
得居 V1.3.0 苹果版 就问律师版 V3.4.5 iPhone版
就问律师版 V3.4.5 iPhone版 安歆乐活 V1.7.5 苹果版
安歆乐活 V1.7.5 苹果版 铁甲 V5.0.0 苹果版
铁甲 V5.0.0 苹果版 机场停车 V4.0 苹果版
机场停车 V4.0 苹果版 山姆会员商店 V4.2.1 苹果版
山姆会员商店 V4.2.1 苹果版 即视通 V5.7.6 苹果版
即视通 V5.7.6 苹果版  飞碟Live V2.0.0 苹果版
飞碟Live V2.0.0 苹果版 趣跑 V4.2 苹果版
趣跑 V4.2 苹果版 婴芭莎 V2.2.1 苹果版
婴芭莎 V2.2.1 苹果版 美住 V2.2.08 苹果版
美住 V2.2.08 苹果版- 本类推荐
- 本类排行
- 1RobotStudio V5.15.02 官方版
- 2Il2CppDumper(unity游戏修改工具) V4.6.0 免费版
- 3Exportizer(修改编辑数据库软件) V8.0.7 官方版
- 4PatchWise(软件设计开发工具) V3.29 官方版
- 5欧姆龙CX-One编程软件 V4.5 官方版
- 6欧姆龙编程软件CX-One V4.30 官方版
- 7sqlmap(sql注入测试工具) V1.0 中文免费版
- 8PB DeCompiler(PB反编译大师) V2010.10.02 试用版
- 9ASA Code Factory(数据库管理工具) V17.4.03 官方版
- 10PhpStorm V2017.3 中文免费版
- 热门软件
- 热门标签
 RobotStudio V5.15.02 官方版
RobotStudio V5.15.02 官方版 Il2CppDumper(unity游戏修改工具) V4.6.0 免费版
Il2CppDumper(unity游戏修改工具) V4.6.0 免费版 Exportizer(修改编辑数据库软件) V8.0.7 官方版
Exportizer(修改编辑数据库软件) V8.0.7 官方版 PatchWise(软件设计开发工具) V3.29 官方版
PatchWise(软件设计开发工具) V3.29 官方版 欧姆龙CX-One编程软件 V4.5 官方版
欧姆龙CX-One编程软件 V4.5 官方版 欧姆龙编程软件CX-One V4.30 官方版
欧姆龙编程软件CX-One V4.30 官方版 sqlmap(sql注入测试工具) V1.0 中文免费版
sqlmap(sql注入测试工具) V1.0 中文免费版 PB DeCompiler(PB反编译大师) V2010.10.02 试用版
PB DeCompiler(PB反编译大师) V2010.10.02 试用版 ASA Code Factory(数据库管理工具) V17.4.03 官方版
ASA Code Factory(数据库管理工具) V17.4.03 官方版 PhpStorm V2017.3 中文免费版
PhpStorm V2017.3 中文免费版
 Scratch V6.0 官方版
Scratch V6.0 官方版 Pycharm2019.2永久激活版 中文免费版
Pycharm2019.2永久激活版 中文免费版 Batch Compiler(脚本编译软件) V17.1.0.0 官方版
Batch Compiler(脚本编译软件) V17.1.0.0 官方版 Pangolin(穿山甲SQL注入工具) V4.0 绿色免费版
Pangolin(穿山甲SQL注入工具) V4.0 绿色免费版 TxtToPG(数据库转换工具) V2.5 绿色版
TxtToPG(数据库转换工具) V2.5 绿色版 UiPath Studio V2019.4.4 免费汉化版
UiPath Studio V2019.4.4 免费汉化版 phpMyAdmin(数据库管理软件) V5.0.1 官方最新版
phpMyAdmin(数据库管理软件) V5.0.1 官方最新版 VisualNEO Web(应用程序创建发布工具) V19.9.16 官方版
VisualNEO Web(应用程序创建发布工具) V19.9.16 官方版 FixMouseLMB(鼠标左键修复工具) V1.0 免费版
FixMouseLMB(鼠标左键修复工具) V1.0 免费版 Abonsoft Folder Compare(文件比较工具) V1.0.0 官方版
Abonsoft Folder Compare(文件比较工具) V1.0.0 官方版
 frmhook(鼠标连点按键记录器) V1.0.0.0 绿色免费版
frmhook(鼠标连点按键记录器) V1.0.0.0 绿色免费版 UBIN(二进制文件合并工具) V1.0 绿色版
UBIN(二进制文件合并工具) V1.0 绿色版 Sync Breeze(快速文件同步工具) x64 V12.1.24 官方版
Sync Breeze(快速文件同步工具) x64 V12.1.24 官方版 好用条码标签打印软件 V6.1 绿色版
好用条码标签打印软件 V6.1 绿色版 CreateInstall Free(制作安装软件) V8.5.1.0 官方版
CreateInstall Free(制作安装软件) V8.5.1.0 官方版 Folder Menu(文件夹切换软件) V3.1.2.2 绿色中文版
Folder Menu(文件夹切换软件) V3.1.2.2 绿色中文版 DMS Shuttle(文件迁移工具) V1.4.0.102 官方版
DMS Shuttle(文件迁移工具) V1.4.0.102 官方版 Memo Book(个人信息管理工具) V8.2 官方版
Memo Book(个人信息管理工具) V8.2 官方版 月上梦之恋窗口信息查看 V1.0 绿色免费版
月上梦之恋窗口信息查看 V1.0 绿色免费版 Detwinner(重复文件查找清理软件) V2.04.001 官方版
Detwinner(重复文件查找清理软件) V2.04.001 官方版
